With the continuous improvement of the performance of the microcomputer, many large-scale CAD design software has launched its microcomputer version, and there are software such as SolidWorks running directly on the microcomputer. In the field of robotics, offline programming software such as ROBCAD, IGRIP, WORKSPACE, etc., which have been running on high-end graphics workstations, have launched Windows-based offline programming systems. These softwares are general offline programming software, and there is still no support for special applications of arc welding. For example, WORKSPACE pays more attention to the development of calibration functions [1]. When programming a program, the user must also establish a robot motion path through graphical teaching. This is a considerable amount of work for programming large workpieces or complex paths. From the development direction, the offline programming system is developing towards the direction of intelligence, user programming is more and more simple and convenient, and automatic programming technology has become the goal pursued by people.
The offline programming system platform AutoCAD2000 developed by the welding laboratory of Harbin Institute of Technology has proved that due to its own reasons in the development of the software, there are some shortcomings in the software. The solid modeling ability in 3D design is insufficient, and the system cannot support it. The modeling of complex work units cannot be put to practical use. At present, the offline programming system with certain self-planning ability will greatly reduce the workload of the user, and the acquisition of the workpiece CAD information becomes the data input of the subsequent planning. This requires the platform of the offline programming system to have a strong modeling function and can The welding workpiece in the welding task is modeled. Because AutoCAD's own 3D modeling function is very weak, AutoCAD will not be able to get enough workpiece modeling information and adopt the subsequent automatic planning function.
The development of a cheap and professional arc welding offline programming system suitable for Chinese enterprises is of great significance for promoting the practical application of off-line programming.
1 system development environment
Due to its low price and the functions required by the average user, SolidWorks has become the world's 3D mainstream design market with the largest number of users, the highest user satisfaction, and the number one sales. It has more than 325,000 users worldwide. And its secondary development is very powerful, able to develop an arc welding offline programming system. The developed offline programming system will have strong modeling capabilities, so that it has strong ability to acquire workpiece and weld information, and maximizes the automatic programming task. Such an arc welding off-line programming system is easily accepted by SMEs.
This paper applies the programming method of COM technology, and uses SolidWorks API secondary development interface and VC++ 6.0, ATL as development tools to develop arc welding offline programming system on SolidWorks platform.
The SolidWorks API provides a large number of COM objects for secondary development [2]. These COM objects cover all SolidWorks data models. By calling SolidWorks COM objects, users can implement the same SolidWorks in their own systems. The function. Figure 1 shows the main SolidWorks API object model.
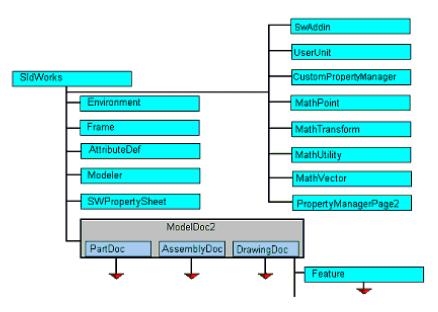
Figure 1 SolidWorks API object model [2]
2 Object modeling of robot arc welding offline programming system
The object model represents the static, structured system "data" nature. It is a mapping of objects that simulate objective world entities and the relationship between objects, and describes the static model of the system. The relationship between class-&-objects can be summarized as inductive, combined, and associative.
This paper presents the main data structures in the three-layer robot work unit: the work unit class, the description of the combination of objective objects such as robots and the various connections and interactions between these objects; equipment and joints.
In order to visually characterize the motion of the welding torch in a graphical environment, a path object is defined. There are multiple tag point objects in the path object, and there is a restricted association between a path object and a component object. Based on the above analysis, an object model of the offline programming and simulation system is established, as shown in Figure 2.
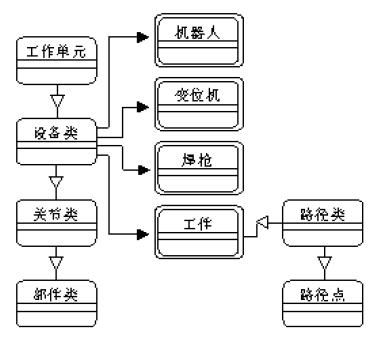
Figure 2 System object model
Next page
Our LED Emergency Batten Light is perfect for commercial and industrial use, made from solid polycarbonate with a thick poly carbonate diffuser the unit is very durable this fitting has an IP rating of 65 and is anti corrosive. Interal lithium battery pack to make emergency time rating from 60-180mins. The fitting gives off an impressive 5850 lumens using only 65 watts of energy making it a great energy saving light fitting. The batten uses high quality LED chips giving off a great array of light to any indoor and outdoor area.
Emergency Batten Light,Emergency Led Batten,Emergency Light Batten,Led Emergency Batten Light
Foshan Nai An Lighting Electric Co.,ltd , https://www.twinspotlights.com